Dans les transmissions radio-amateur en mode numérique certains protocoles (WSPR, FT8, …) nécessitent une synchronisation de l’ordre de la seconde entre toutes les stations.
Pour disposer d’une heure précise sur ESP32 il existe plusieurs solutions : – la connexion à un serveur NTP, – la connexion à un GPS, – l’utilisation d’une horloge temps-réel sauvegardée – une combinaison de plusieurs méthodes.
Les deux premières solutions impliquent soit d’être connecté à un réseau (WiFi, …) soit de pouvoir recevoir les signaux GPS ce qui n’est pas toujours possible.
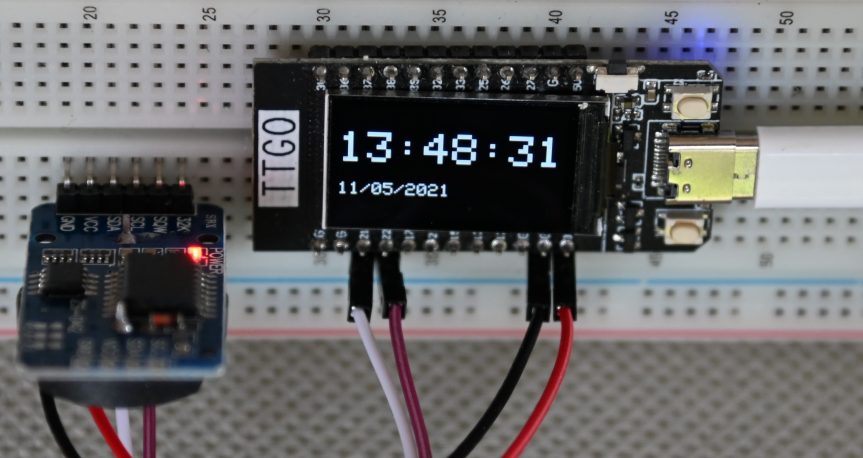
L’article présente la réalisation d’un affichage de l’heure et de la date sur un ESP32 TTGO T-Display avec l’utilisation d’une horloge temps-réel sauvegardée DS3231.
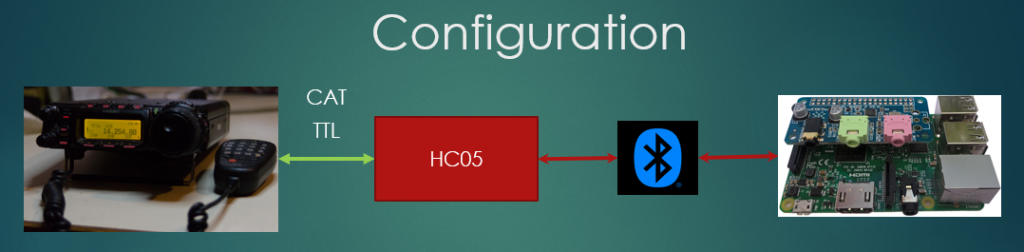
Cet article décrit la solution adoptée pour établir une liaison série Bluetooth entre un Raspberry Pi et un module HC05. Cela me permet de connecter le FT857 en Bluetooth sur le Raspberry Pi.
Le pilotage d’un poste radio (CAT) se fait habituellement par une application installée sur une machine cible, cette application étant souvent développée en fonction d’un système d’exploitation (Windows, Unix, …). Après une présentation des aspects fonctionnels dans un précédent article, cette vidéo présente les aspects techniques de la réalisation d’un pilotage du FT-857D à l’aide d’un applicatif développé sur un navigateur web.
Il existe actuellement des solutions éprouvées utilisant un Raspberry Pi pour piloter une station radio à distance (station remote) quelles soient industrielles ou Open Source; on peut citer la solution RIGPI de MFJ ou les développements Open Source de RemoteQTH.
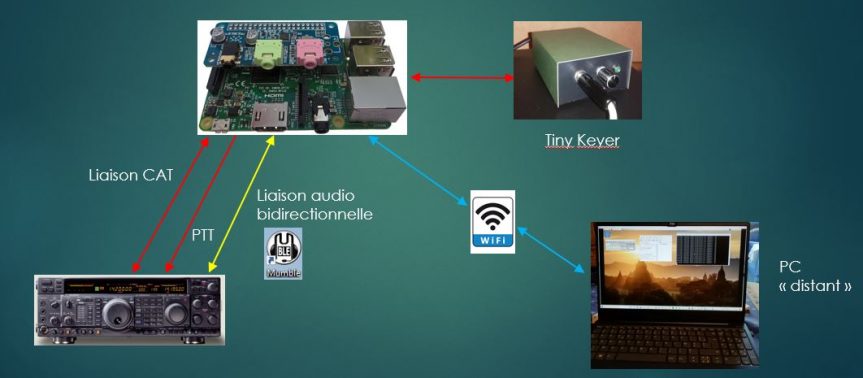
Possédant un Raspberry Pi 3B avec une carte son j’ai voulu réaliser une maquette de pilotage à distance de mon FT-1000 Mark V Field qui ne nécessite pas de développements et utilise uniquement des logiciels Open Source, gratuits ou à faible coût de licence. Maquette puisque une solution opérationnelle doit prendre en compte les ON/OFF de la radio, les reset du Raspberry Pi, la sécurité informatique (anti-intrusion, …) et les éventuelles commutations de périphériques (ampli, antennes, …)
J’utilisais déjà mon Raspberry Pi pour faire du FT8 piloté à distance par mon PC en utilisant VNC Viewer. J’ai donc recherché une solution logicielle pour transmettre le son entre la radio et le PC et une solution pour piloter de manière simple et conviviale la radio : – pour le son j’ai choisi la suite Mumble qui a le temps de latence le plus réduit, les autres solutions conduisant à des latences de plus d’une seconde, – pour le pilotage de la radio j’ai retenu flrig qui prend en charge 60 radios différentes et qui a une interface conviviale (autres logiciels testés GRIG et rigctl).
La solution décrite a été utilisée avec succès pour faire des QSOs phonie avec le Yaesu FT-1000 Mark V Field sur un LAN WiFi. Elle fonctionne également avec un Yaesu FT-857D.
J’ai aussi testé une seconde solution qui utilise les suites logicielles habituelles sur le PC (DXLab, HAMRadio Deluxe, N1MM+) pour piloter la radio en utilisant des ports COM TCP. Elle sera décrite dans une autre présentation.
Cette page contient une vidéo de présentation de la première solution et un fichier fournissant l’ensemble des commandes pour installer les logiciels.
Le pilotage d’un poste radio se fait habituellement par une application installée sur une machine cible, cette application étant souvent développée en fonction d’un système d’exploitation (Windows, Unix, …). Cette vidéo présente un pilotage du FT-857D à l’aide d’un applicatif développé sur un navigateur web et donc indépendant du système. Le serveur web est une carte micro-contrôleur ESP32 TTGO connectée sur le FT-857D.
Les développements réalisés s’appuient sur ceux décrits à l’article sur la visualisation des paramètres du FT-857D sur ESP32.
La vidéo présente les aspects fonctionnels des développements.
Cette réalisation est le portage de la bibliothèque CAT du FT-857D et de l’application de visualisation correspondante sur l’ESP32 T-Display. Ces logiciels ont été développés initialement sur Arduino Nano (voir article) Le but est de disposer d’une plate-forme de la même taille que l’Arduino Nano mais disposant en plus de la liaison série d’un WiFi et d’un Bluetooth intégrés.
Une application de démo du TTGO T-Display est disponible sur Github/Phil-f6czv.
Cette application : – affiche une image puis une séquence temporisée de fonds de différentes couleurs (rouge, bleu, vert), – affiche la tension d’alimentation sur appui court du bouton GPIO 35, – met en sommeil l’ESP32 sur appui long du bouton GPIO 35, – lance un scan WiFi sur appui court du bouton GPIO 0 et affiche le résultat.
Cet article fournit tout d’abord des références de documentation sur l’ESP32 puis sur la carte de développement LilyGO TTGO T-Display utilisée dans mes projets.
Une visualisation de différents paramètres du Yaesu FT-857D sur un écran LCD 4×20 a été réalisée. Elle met en œuvre par la liaison série les commandes CAT (Computer Aided Transceiver) du FT-857D et des commandes supplémentaires de lecture de l’EEPROM du transceiver. Les développments ont été réalisés à partir d’un code développé pour Arduino par VE3BUX.